受限於新馬種的產生方式,由於現有馬種已非常優秀,繁殖更優的馬種已相當困難。
測量[]
生命值[]
可以透過查看HUD來確定,被騎乘生物的生命值與玩家的生命值略有不同。
跳躍高度[]
馬所能跳躍高度的資料值從0.4到1.0不等,即大約1.08到5.29個方塊(與通常的1.0到5.0個方塊有些許出入)。測量這一數值的裝置非常簡單:建造多個逐漸增高且互相平行的牆,中間間隔三個方塊。測試跳躍高度時,只需要從最矮的牆開始一個一個跳,直到不能繼續跳過牆為止。你跳過的最後一面牆的高度即為你的馬的最大跳躍高度。半磚和雪層可以被用於創造一些非完整方塊高度。
| 資料值 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | 玩家 |
|---|---|---|---|---|---|---|---|---|
| 最大高度 | 1.086 | 1.620 | 2.222 | 2.892 | 3.627 | 4.428 | 5.293 | 1.250 |
速度[]
速度應該是最難測量的屬性了。馬的內部速度資料值在0.1125到0.3375之間。一個測量速度的建議是建造有延遲的紅石中繼器,使用中繼器鎖定,建立一個非常長的中繼器鏈。
反比測速法[]
反比測速法的原理是從馬觸發起點裝置時開始計時,觸發終點裝置時停止計時,測得馬從起點到達終點所用的時間。在馬觸發起點裝置時,訊號經過一系列中繼器延遲後到達圖中下方的輸入端,然後經過圖中的紅石火把啟動輸出端的鎖存器,當馬觸發終點裝置時,訊號會同時啟動圖中左邊的所有輸入端,阻止圖中的紅石火把繼續傳遞訊號。終點觸發裝置可能與輸入端有較長的距離,這會導致出現延遲,請確保所有的延遲時間統一,並將設定的延遲計算進去以求得正確的時間。可以透過調節起點輸入端的中繼器延遲多次測量使最終測得時間精確到0.1秒。
利用紅石中繼器可以被另一個指向其邊側的中繼器鎖定的特點,可以在馬觸發終點裝置的時候鎖住每一個中繼器。這將會「凍結」中繼器鏈,訊號也會被凍結在某個位置,從而測得時間,請確保所有中繼器同時被鎖定,並且計算時間時也要考慮中繼器鎖定的延遲。
正比測速法[]
正比測速法測量的是單位時間內馬移動的距離。當馬觸發起點裝置時,關閉訊號會經過一定時間的延遲到達圖中的輸入端,若在這個時間之前馬觸發某個距離的檢測裝置,該裝置的訊號會經過圖中的紅石火把啟動輸出端與該距離對應的鎖存器,在關閉訊號到達圖中的輸入端之後,馬將不能再啟動新的鎖存器。對每個距離對應的檢測裝置輸入關閉訊號的延遲時間必須全部相同,由於紅石訊號傳遞的速度最快可達160米/秒,遠高於馬的速度,所以一般不會出現距離較遠的裝置無法設定為給定延遲的情況,想要測得馬在1秒內移動的距離,應將延遲設為1.1秒,若要測得馬在10秒內移動的距離,則應將延遲設為10.1秒,因為紅石火把存在0.1秒的延遲。
誤差[]
由於遊戲機制是每遊戲刻處理一次馬的移動,也是每遊戲刻處理一次紅石訊號,所以在馬觸發起點裝置或終點裝置時都有最多1遊戲刻的不定延遲,這個延遲可能會影響測試結果,此誤差無法避免,只能透過增加測量時間和距離來縮小誤差。
觸發裝置可以使用壓力板或絆線鉤,但所有的觸發裝置必須統一,不得混用,否則可能會造成額外的誤差,因為壓力板與絆線的碰撞箱不一致。
拔河法[]
在多人遊戲中,可在兩匹由不同玩家騎乘的馬中選出較快的那匹。每個騎在馬上的玩家需要用拴繩拴住對方的馬,然後進行拔河比賽,更容易被拉動的馬就是較慢的那匹。此方法無需用到紅石電路,但只能比較馬的速度而不能測量馬的速度。
方向[]
無論使用測速法還是拔河法,你都需要控制好馬前進的方向。在Java版中,你可以打開除錯畫面並找到玩家面向的方向,它顯示了玩家視角角度的資料值。你可以暫時地在設定中將靈敏度調低以對齊。也可以使用/tp指令控制方向。
內部速度轉換表[]
| 內部單位 | 0.1125 (最小值) | 0.1688 | 0.2250 | 0.2813 | 0.3375 (最大值) | 1.0000 (參照) |
|---|---|---|---|---|---|---|
| 米/秒 | 4.85 | 7.28 | 9.70 | 12.13 | 14.55 | 43.10 |
育種難易度[]
{kind=link}
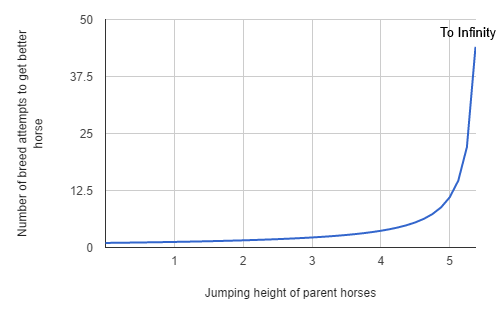
隨著馬匹質量越來越高,想讓它們變得優良就越來越難,如本圖所示
透過平衡雙親屬性,兩頭馬交配並隨機生成了一頭新的馬。平均/算術平均值將始終小於被平均數值的最大值,除非所有數字相同。
按照這個邏輯,如果可以生出一匹完美的馬,那麼它的雙親也會是完美的,那麼這三匹馬任意交配所得出的平均值也足以生成一隻完美的馬。所以,如果沒有兩隻完美的馬交配產生後代,就沒有完美的馬會被生出來。
| 雙親屬性 | 育種優良子代的機率 | 子代最大屬性 | ||||
|---|---|---|---|---|---|---|
| 跳躍高度 | 生命值 | 速度 | 跳躍高度 | 生命值 | 速度 | |
| 0.40 (1.09m) | 15( |
0.1125 (4.8m/s) | 100% | 0.60 (2.22m) | 20( |
0.1875 (8.1m/s) |
| 0.55 (1.91m) | 18( |
0.1686 (7.3m/s) | 75% | 0.70 (2.89m) | 22( |
0.2250 (9.7m/s) |
| 0.70 (2.89m) | 22( |
0.2250 (9.7m/s) | 50% | 0.80 (3.63m) | 24( |
0.2625 (11.3m/s) |
| 0.85 (4.02m) | 26( |
0.2813 (12.1m/s) | 25% | 0.90 (4.43m) | 27( |
0.3000 (12.9m/s) |
| 1.00 (5.29m) | 30( |
0.3375 (14.5m/s) | 0% | 1.00 (5.29m) | 30( |
0.3375 (14.5m/s) |
在屬性達到跳躍高度3.13個方塊、22點生命值、或者9.7方塊(或米)/每秒之後,任何的繁殖行為都會有更大的機率生產出更差屬性的子代。因為比親代的屬性更好的馬隨著親代屬性的變化而變化,在生成優良子代的範圍中,親代的屬性越好,範圍越小。結果是,為了得到更好的馬匹所需要的馬匹數成倍的增加了,直到得到了比不可能得到的完美的馬稍遜一些的馬匹,屬性最大值在表格中。
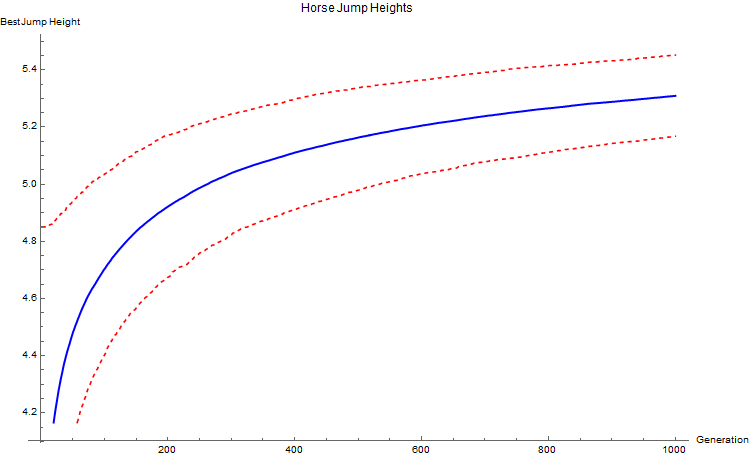
這個圖表表示了在1000次繁育後,某位玩家的最好的馬的跳躍高度,藍線表示最好的馬的平均跳躍高度,且馬匹的跳躍高度在紅線中的機率為95%。

{kind=link}
最優育種方案[]
最佳的育種方案是,首先用兩匹馬開始繁殖,如果子代比最差的馬好,就用子代替換最差的馬。每生產一個子代算進行了一次育種嘗試,無論它是否代替了親代。
這個育種方案證明很難在數學上建模,因為每次嘗試都會改變機率,所以,下列的圖表顯示了每個表超過420000次實驗得出的資料。 如果雙親都有下表中列出的屬性,下表將會列出目標到達前所需要的後代數量
注意:馬匹屬性的最大值是不可能透過繁殖來實現的。
| 對象 | 雙親 | |||||
|---|---|---|---|---|---|---|
| 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | |
| 0.5 | 1 | — | — | — | — | — |
| 0.6 | 4 | 2 | — | — | — | — |
| 0.7 | 7 | 6 | 3 | — | — | — |
| 0.8 | 14 | 13 | 11 | 7 | — | — |
| 0.9 | 36 | 34 | 32 | 29 | 22 | — |
| 0.95 | 78 | 77 | 75 | 71 | 64 | 44 |
| 0.99 | 404 | 403 | 400 | 394 | 390 | 368 |
| 對象 | 雙親 | |||||
|---|---|---|---|---|---|---|
| 15 | 18 | 21 | 24 | 27 | 28 | |
| 16 | 1 | — | — | — | — | — |
| 18 | 2 | — | — | — | — | — |
| 20 | 3 | 2 | — | — | — | — |
| 23 | 8 | 6 | 3 | — | — | — |
| 26 | 20 | 18 | 15 | 9 | — | — |
| 28 | 46 | 45 | 42 | 36 | 19 | — |
| 29 | 100 | 98 | 95 | 89 | 73 | 56 |
| 對象 | 雙親 | |||||
|---|---|---|---|---|---|---|
| 0.1125 | 0.15 | 0.2 | 0.25 | 0.3 | 0.33 | |
| 0.125 | 1 | — | — | — | — | — |
| 0.15 | 1 | — | — | — | — | — |
| 0.2 | 4 | 3 | — | — | — | — |
| 0.25 | 11 | 10 | 7 | — | — | — |
| 0.3 | 36 | 34 | 31 | 25 | — | — |
| 0.33 | 207 | 205 | 203 | 195 | 173 | — |
| 0.337 | 2913 | 2917 | 2916 | 2929 | 2896 | 2738 |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
語言